ربات تمیز کننده آند پخته





ربات تمیز کننده آند پخته
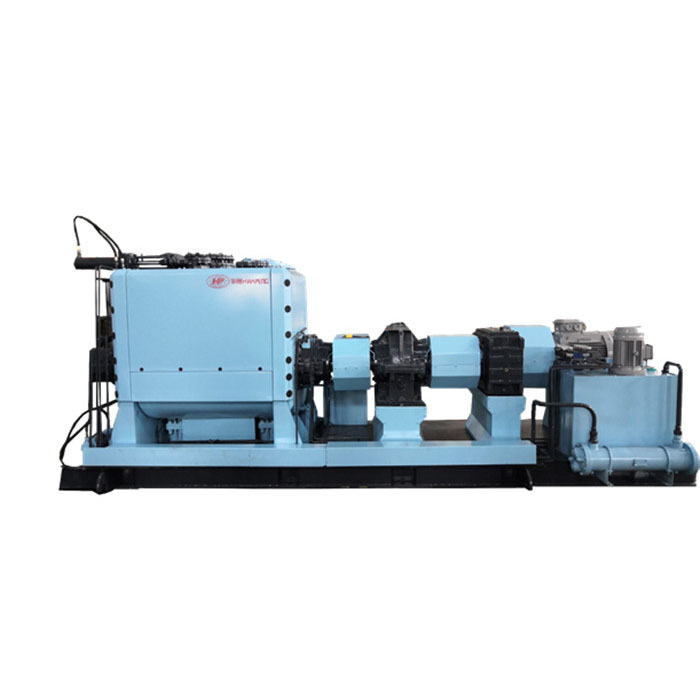
ربات تمیز کننده آند پخته یک ربات پولیش هوشمند مصنوعی است که توسط شرکت ما با هدف محیط کاری سخت در هنگام تمیز کردن و پرداخت آندهای پخته شده برای کارخانه های ذوب آلومینیوم ساخته شده است.
دوربین یادگیری عمیق از بلوک های آند عکس می گیرد، پس از پردازش ابری و تصویربرداری سه بعدی، مختصات سه بعدی بلوک های آند را برای ربات ارسال می کند، سپس ربات سطوح بلوک آند، سوراخ های خرد و فلوت ها را تمیز می کند، دستگاه جمع آوری گرد و غبار در حالی که ربات سوراخ های خرد را تمیز می کند، کک بسته بندی را بیرون بیاورید.
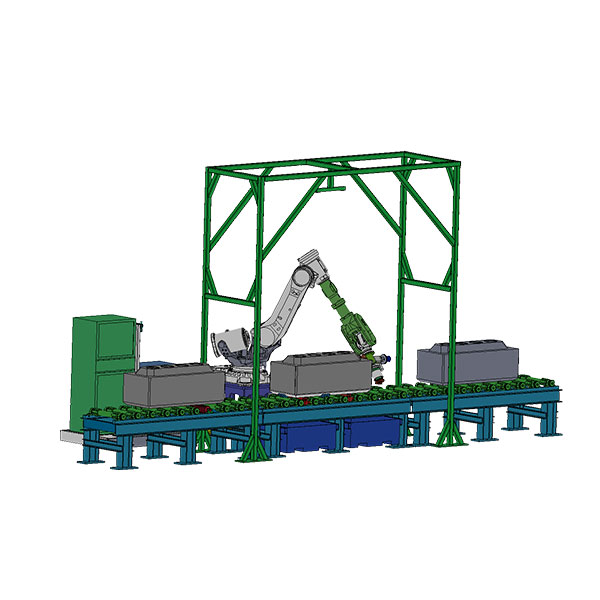
پیکربندی سیستم
1 سیستم و نرم افزار شکل دهی بصری
2 ربات و سیستم پولیش
3 جمع آوری گرد و غبار و سیستم کنترل الکتریکی
4 سیستم انتقال بلوک آند
مزایای
1.حس بیدرنگ هوشمند
الگوریتم یادگیری عمیق که به طور مستقل توسط شرکت ما تحقیق و توسعه شده است، می تواند موقعیت بلوک های کربنی و وضعیت حرکت ربات را در زمان واقعی حس کند تا اقدامات پرداخت ربات را تنظیم کند.
2. پرداخت انعطاف پذیر
برس در فرز شناور به ربات اجازه می دهد تا کک بسته بندی را که کمی روی سطح بلوک های آندی چسبیده است، بدون آسیب رساندن به بلوک های کربنی جدا کند.
3. بدون گرد و غبار تمیز کنید
دستگاه جمعآوری گرد و غبار میتواند کک بستهبندی را که از بلوکهای آند جدا شده است را از بین ببرد و نیازی به تمیز کردن دستی نیست.
4. تمیز کردن کامل فلوت ها در سوراخ های خرد
فلوت ها در سوراخ های خرد با فرز برش تمیز می شوند که می تواند بسته بندی چوب کک داخل آن را کاملا تمیز کند.

فن آوری های تمیز کردن سوراخ های خرد
1. مجموعه فرز تمیز کننده فلوت
تمیز کردن لوله سوراخ خرد شده توسط یک فرز چرخشی با سرعت بالا تکمیل می شود که می تواند کک بسته بندی را تمیز کند.
بدون نیروی ضربه، به طور موثر از آسیب ضربه دستکاری کننده جلوگیری کنید و از دقت عملکرد دستکاری کننده اطمینان حاصل کنید.
2. مکانیسم سنجش هوشمند
اسکراپر مارپیچ مجهز به سنسور سرعت است.زمانی که آهن در آن وجود دارد
بسته بندی کک، سرعت به سرعت کاهش می یابد، به طوری که آسیاب را متوقف می کند و می دهد
زنگ خطر. هشدار.
3. مکانیسم مکش سوراخ خرد
خراش مارپیچ می تواند کک بسته بندی را در سوراخ خرد و بسته بندی را خراش دهد
کک توسط لوله مکش در وسط مکیده می شود.
فن آوری های تمیز کردن سطح آند
1. مکانیزم تمیز کردن شناور کنترل شده با نیروی
نیروی فشار توسط سیلندر، که توسط شیر تناسبی پیزوالکتریک کنترل می شود، با حساسیت بالا و پاسخ سریع تحقق می یابد.
2. مکانیزم انتقال توپ
انتقال قدرت از انتقال توپ، با دقت کنترل فشار بالا، اصطکاک چرخشی کوچک و بدون بستن ابزار استفاده می کند.
3. زاویه سر کاتر شناور
سر کاتر در جهت زاویه ای شناور می شود تا سر برش نزدیک به قطعه کار قرار گیرد.
4. اکتساب و کنترل هوشمند
با سنسورهای سرعت و جابجایی، سیگنالهای بازخورد بلادرنگ در طول فرآیند کار ارائه میشوند تا پارامترهای مختلف آسیاب را در زمان واقعی تغییر دهند.
دستیابی به بهترین اثر تمیز کنندگی
5. عملکرد خود تکیه
این برنامه دارای عملکرد خودآموزی است.هر چه داده های بیشتری در پایگاه داده انباشته شود، اثر سنگ زنی بهتر خواهد بود.
6. طراحی برش و انتخاب مواد
سر کاتر از فولاد آلیاژی Cr12 ساخته شده است که محکم و بادوام است.نوک تیغه تیغه فولادی تنگستن تمام شده است که به راحتی قابل تعویض است.